Agilis, gyors és még hurkokat vagy szűk fordulatokat is végre tud hajtani – bemutatkozik a FESTO BionicSwift. A rádióalapú beltéri GPS kommunikációs segítségével az öt mesterséges fecske összehangoltan, önállóan mozog egy meghatározott légtérben.
Ultrakönnyű repülő tárgyak természeti modellekről mintázva
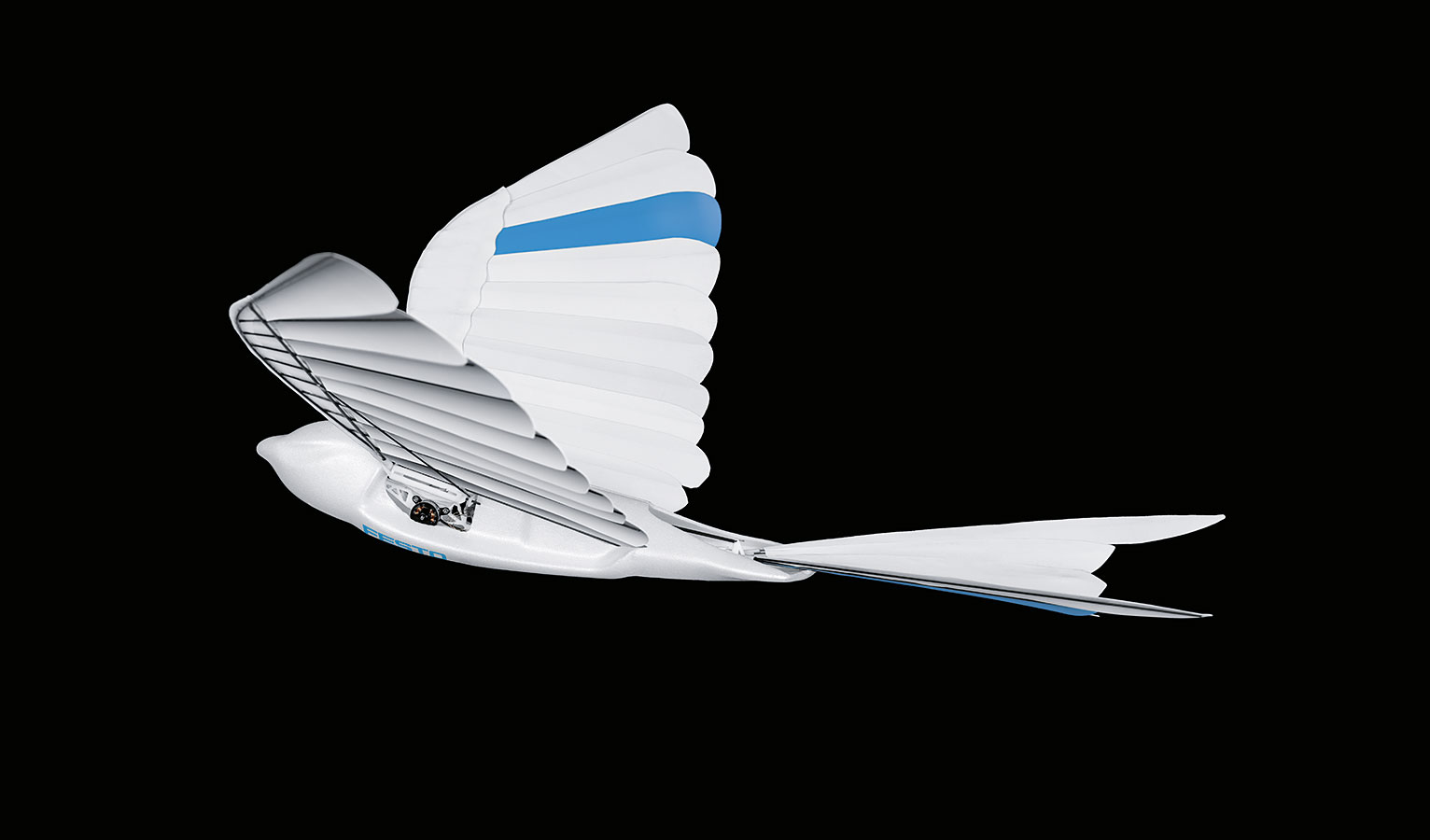
A robotmadarak tervezésekor a hangsúly – akárcsak biológiai eredetijük esetében – a könnyűszerkezetek használatán volt. A mérnöki munkára ugyanis ugyanazok a szabályok vonatkoznak, mint a természetre: minél kevesebb tömeget kell mozgatni, annál kevesebb az anyagfelhasználás és az energiafogyasztás. Így hát, 44,5 centiméteres testhosszal és 68 centiméteres szárnyfesztávolsággal, a bionikus madarak súlya mindössze 42 gramm.

Aerodinamikus tollazat a hatékony repüléshez
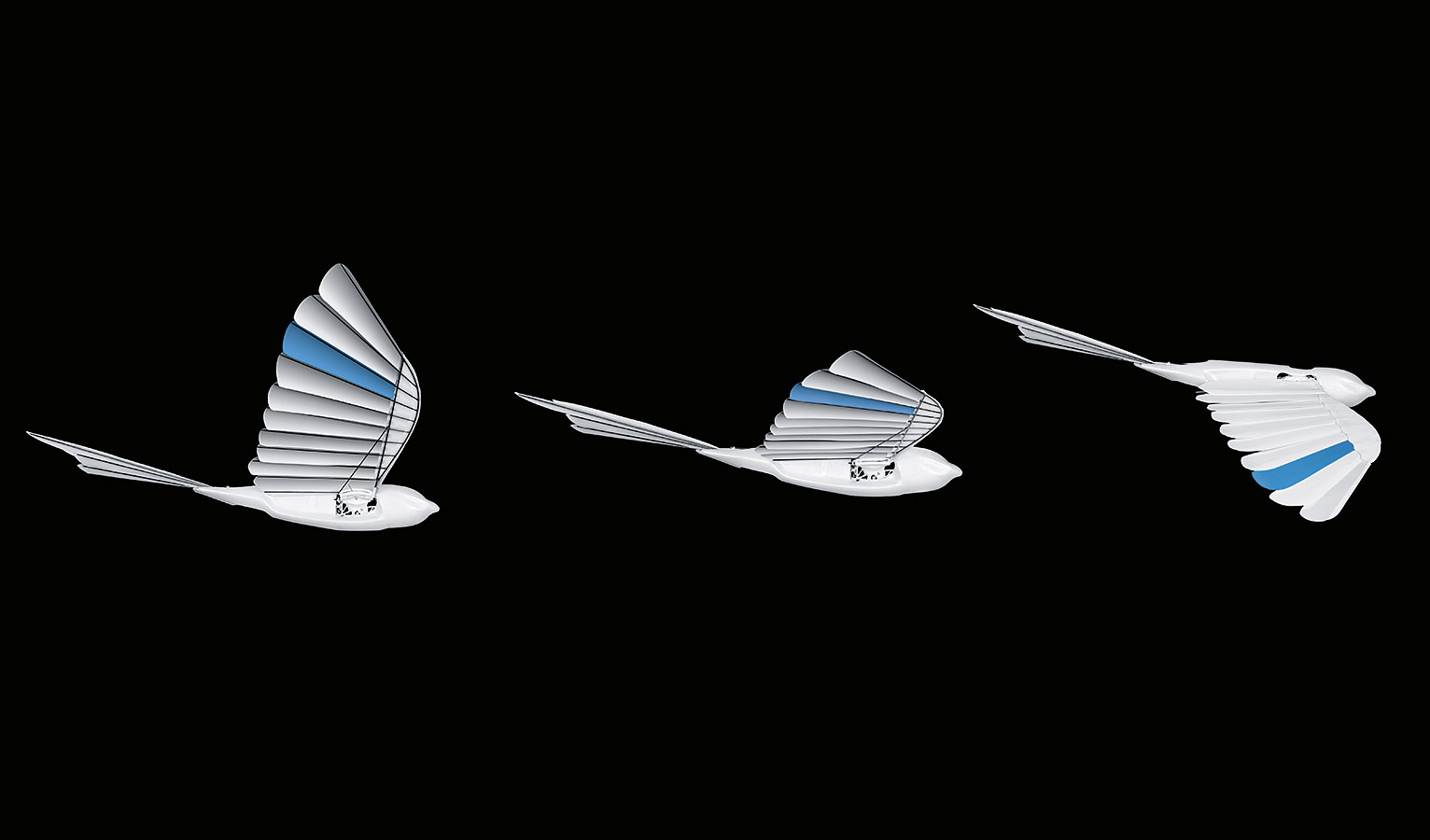
Hogy a repülési manőverek a lehető legélethűbbek legyenek, a FESTO mérnökei a szárnyakat az igazi fecskék tollazatáról mintázták. Az egyes lamellák rendkívül könnyű, rugalmas, de nagyon robusztus habból készülnek, és úgy helyezkednek el egymáson, mint a zsindely. A tollak, akárcsak a természetes modelleknék, a tényleges szárnyhoz vannak rögzítve, jelen esetben karbonból készült tollszárakkal.

A szárny felcsapása közben az egyes lamellák kihúzódnak, hogy a levegő átáramolhasson a szárnyakon. Ez azt jelenti, hogy a madaraknak kevesebb erőre van szükségük a szárny felfelé húzásához. A szárnyak lecsapásakor pedig a lamellák bezáródnak, hogy a madarak több energiát generálhassanak a repüléshez. Ennek a természethez nagyon közeli replikának köszönhetően a BionicSwift jobb repülési profillal bír, mint a korábbi szárnycsapó hajtások.
Funkcionális integráció a legszűkebb terekben is
A madártest tartalmazza a kompakt szárnycsapó mechanizmust, a kommunikációs technológiát, a szárnycsapáshoz szükséges vezérlő komponenseket és az emelőszerkezetet: a farkot. Egy kefe nélküli motor, két szervomotor, az akkumulátor, a sebességváltó, valamint a különféle rádió, vezérlő és lokalizációs áramkörök pedig egy rendkívül kis helyre vannak telepítve.
A motorok és a mechanika intelligens interkaciója lehetővé teszi egyebek mellett a szárnycsapások frekvenciájának és az emelő csapásszögének precíz beállítását a különböző manőverek végrehajtásához.
Repülési manőverek koordinációja GPS-szel
A BionicSwift madarak koordinált, biztonságos repülését egy ultraszélessávú technológiával (UWB) ellátott, rádió alapú beltéri GPS biztosítja. Ennek érdekében egy szobába több rádiómodult is felszerelnek, amelyek meghatározzák egymás pozícióját és a szabályozott légteret. A robotmadarakat ugyancsak ellátják egy rádió jeladóval. Utóbbiak jeleket küldenek a szobában elhelyezett, egyfajta “horgonyként” funkcionáló moduloknak, amelyek így képesek meghatározni az egyes madark pozícióját is. Ezt az adatot pedig egy navigációs rendszerként működő, központi számítógéphez küldik.

Ezzel lehetőség nyílik az útvonaltervezésre, így a madarak egy előre programozott útvonalat repülnek be. Amennyiben a szél, hőmérséklet vagy egyéb környezeti hatások következtében a madarak esetleg eltérnek röppályájuktól, azonnal korrigálják magukat, teljesen önállóan, emberi beavatkozás nélkül. A rádiókommunikáció akkor is pontos helyzetmeghatározást biztosít, ha a vizuális érintkezés valami akadály következtében gátolva van. Az UWB technológia ilyen esetekben is garantálja a biztonságos és problémamentes működést.
Új lendület az intralogisztikához
A repülő objektumok intelligens hálózatba szervezése és a GPS-es útvonaltervezés egy olyan 3D-s navigációs rendszer alapjait jelenthetik, amelyek a jövő gyáraiban kerülhetnek alkalmazásra. A különböző nyersanyagok és áruk áramlásának pontos lokalizálása optimalizálhatja a gyártófolyamatok sorrendjét és előrejelezheti a szűk keresztmetszeteket. Az autonóm repülő robotok emellett anyagszállításra is felhasználhatók, a repülőfolyosók alkalmazásával ugyanis jelentősen javítható egy gyár helykihasználtsága.
ForrásFESTO