A cobot vagy kollaboratív robot kifejezéssel valószínűleg mára már mindenki találkozott valahol. Ezeket a berendezéseket is ipari környezetben használják, legfőbb megkülönböztető jegyük azonban, hogy nem igényelnek biztonsági kerítést vagy fénysorompót, így közvetlen emberi kollaborációra is alkalmasak. És, hogy miben különböznek még? Azt jelen cikkünkben fogjuk részletesebben is bemutatni.

Forrás: FANUC
Hogy egyáltalán mit is hívunk robotnak, ezen belül milyen területet foglalnak el az ipari robotok és mik voltak nagyjából 70 éves történelmük főbb mérföldkövei, arról egy korábbi cikkünkben már kimerítően beszámoltunk. Jelen anyagnak ezért ez nem is célja, a fókusz most kifejezetten a kollaboratív robotok, azaz cobotok sajátosságaira kerül.
Kezdjük is rögtön azzal, hogy egyáltalán hol helyezkednek el a cobotok a robotok világában. A robotgyártó cégekből és nemzeti robot egyesületekből álló Nemzetközi Robotikai Szövetség (IFR) két különböző típusú robotot különböztet meg: az ipari környezetben használt, gyártófolyamatok automatizálásáért felelős ipari robotokat és az otthoni vagy egyéb professzionális használatra szánt kiszolgáló robotokat. Utóbbiak tulajdonképpen tekinthetők cobotnak, hiszen képesek közvetlenül emberek mellett dolgozni, a kifejezés alatt azonban főként az ipari robotok azon új csoportját kell érteni, amelyek megszüntetik az ipari környezetben korábban megszokott védelmi korlátok szükségét.
A cobotok vagy kollaboratív robotok tehát olyan robotok, amelyek alkalmasak közvetlen ember-robot interakciókra közös térben vagy szoros közelségben. Alkalmazásuk így eltér a hagyományos, az emberi munkaerőtől elkerített ipari robotokétól.
Egy kis történelem

A Z-Lift Assist korai kollaboratív robot a GM egyik üzemében tesztelve
Az első cobotot 1996-ban találta fel J. Edward Colgate és Michael Peskin, a Northwestern Egyetem két professzora. Egy évvel későbbi, “cobot” címet kapott szabadalmuk szerint a találmány egy “készülék és módszer közvetlen fizikai interakcióra egy személy és egy számítógép által irányított, általános célú manipulátor között.” A projekt egy 1994-es, General Motors kezdeményezésből indult, aminek célja egy robot-szerű berendezés elkészítése volt, amely kellőképpen biztonságos ahhoz, hogy emberek közvetlen közelében is alkalmazni lehessen.
Az első cobotokat a két feltaláló által alapított Cobotics cég gyártotta. Termékeiket elsősorban gépjármű összeszereléshez használták, vezérlésüket tekintve pedig ma a “kézi irányítású vezérlés” kategóriába sorolnánk őket. A céget 2003-ban felvásárolta a Stanley Assembly Technologies. A következő mérföldkő a KUKA és a Német Repülési Központ együttműködéséből született első, ultrakönnyű, számítógép vezérelt cobot, az LBR 3 2004-es bemutatása volt. Ezt követte 2008-ban a Universal Robots első modellje, az UR5, 2015-ben a FANUC első, 35 kg-os teherbírású modellje, a CR-35iA és az ABB dupla karú cobotja, a YuMi.
Cobot vagy robot
1. Biztonság
Az első és legegyértelműbb különbség, a már több ízben is említett biztonságból fakad. A cobotok beépített biztonsági funkciókkal rendelkeznek, így biztonsági kerítések nélkül, az alkalmazottak közvetlen közelében képesek dolgozni – egyfajta segédként támogatják embertársaikat a veszélyes, fárasztó vagy monoton munkafolyamatokban. Ha akadályt észlelnek – legyen szó a legenyhébb ütközésről, például egy emberi kar érintéséről – a cobotok azonnal leállnak, megelőzve ezzel az esetleges sérüléseket.

Forrás: ABB
Az ipari robotok ezzel szemben teljes, emberi beavatkozás nélküli automatizációt biztosítanak, sokszor nagy alkatrészeket és szerszámokat kezelnek, feladataikat gyorsan és rendkívüli ügyességgel hajtják végre. Ennek azonban az az ára, hogy embertársaiktól csak jól elkülönítve, biztonsági kerítésekkel, ketrecekkel vagy fénysorompókkal elzárva tudják dolgukat végezni.
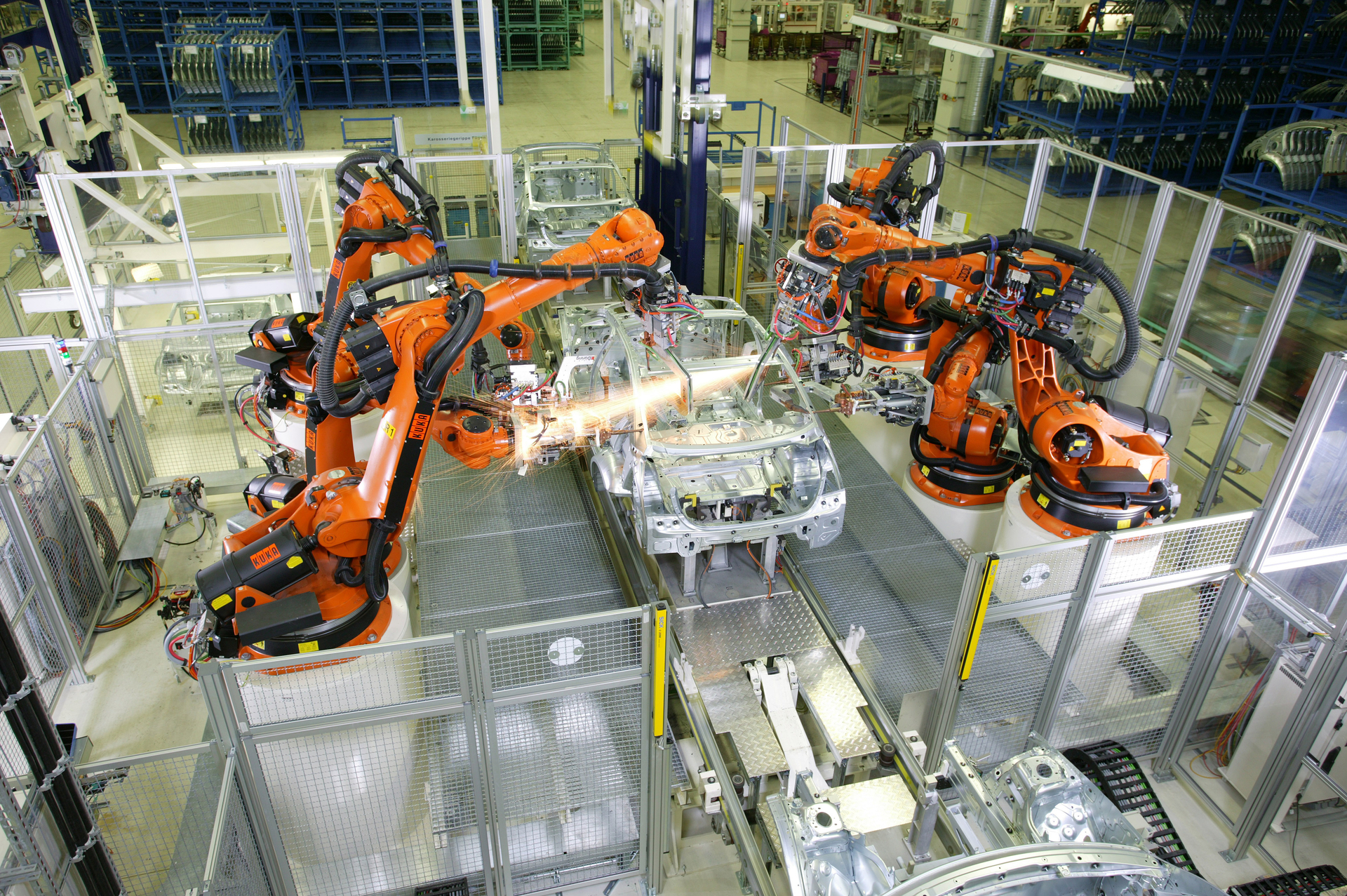
Forrás: KUKA
2. Funkcionalitás, kialakítás
A fenti, kialakítás- és koncepcióbeli különbségekből adódóan a cobotok funkcionalitásukban is különböznek a hagyományos ipari robotoktól. A kollaboratív robotok könnyen átmozgathatók és több gyártófeladatnak megfeleltethetők. A legtöbb típus bármilyen felületre könnyedén telepíthető: horizontálisan, vertikálisan, sőt, akár a plafonra is. Általában súlyuk is kellően könnyű ahhoz, hogy akár egy ember képes legyen átmozgatni őket. Sok esetben ugyan nem tudnak emberi segítség nélkül, önállóan dolgozni, viszont kiválóan alkalmasak aprólékos, precíz, összetett műveleteket igénylő feladatok elvégzésére.

Forrás: FANUC
Nem kollaboratív testvéreik ezzel ellentétben nagyméretűek, nehezek és rengeteg helyet foglalnak, ebből adódóan általában csak rögzítve működnek. Ez jelentősen csökkenti rugalmasságukat, mind az áthelyezést, mind pedig a különböző feladatokra való beállítást illetően. Ezek a robotok ebből kifolyólag elsősorban nagy sorozatos gyártásra ideálisak.
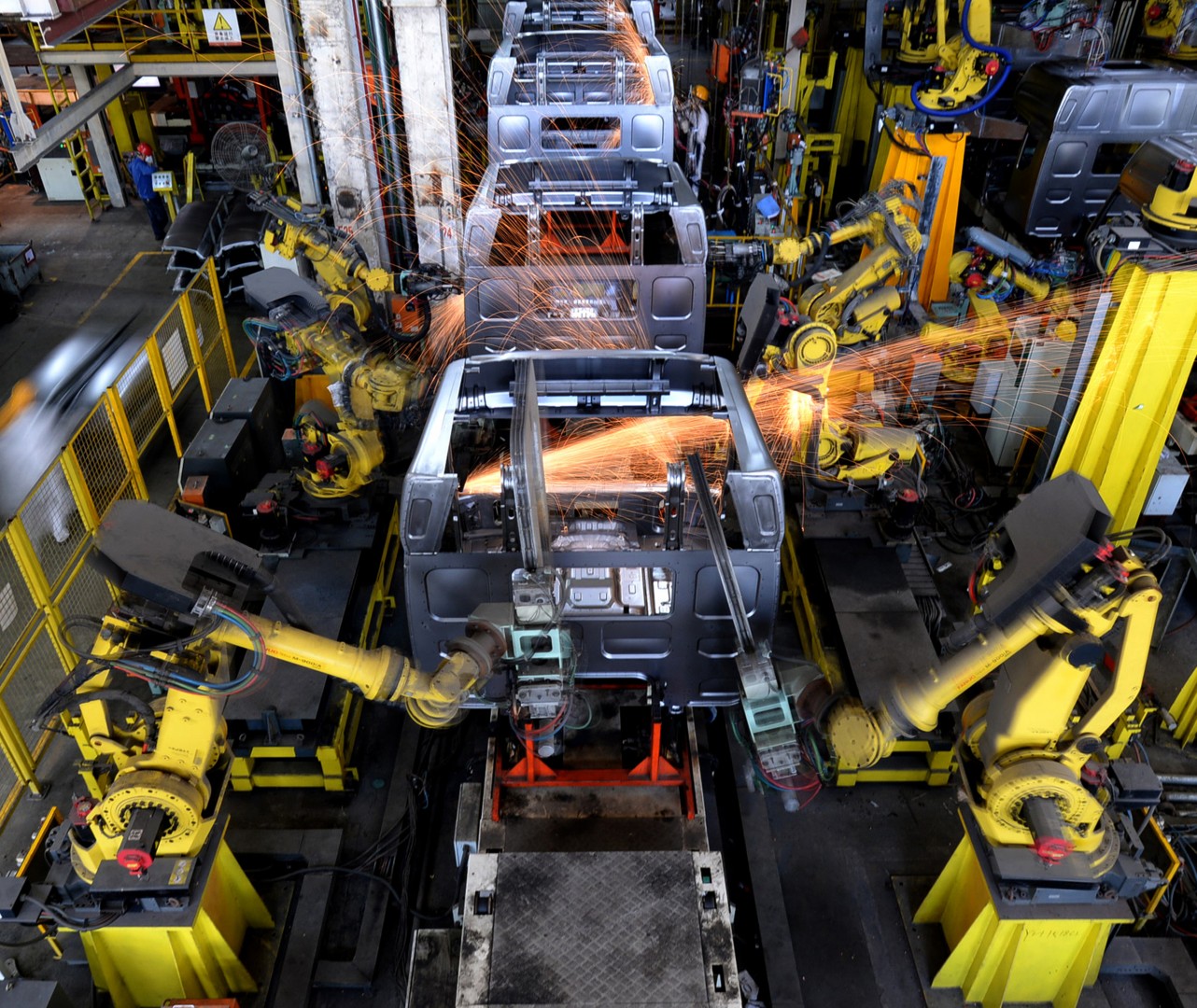
Forrás: FANUC
3. Programozás
A cobotok nemcsak súlyukat tekintve könnyebbek – ez a különbség telepítésükben, programozásukban és használatukban is egyértelműen kiütközik. A TM Robotics egyik jelentése szerint a vásárlók 79%-ának az egyszerű programozhatóság az egyik legfontosabb szempont egy adott robot kiválasztásakor. A cobotokat kifejezetten ennek az igénynek a szem előtt tartásával fejlesztik, ami nem csak a robotprogramozásban nem jártas dolgozók számára kedvező – a tapasztalt szakembereknek is kevesebb, programozással töltött időt jelent. Bizonyos modellek a már fentebb is említett “kézi irányítású vezérlés” elvén működnek, így az operátornak nem kell egyebet tennie, mint, hogy manuálisan a kívánt pozíciókba mozgatja a robotkart, az adott pozíciókat pedig rögzíti annak memóriájában. Néhány típus akár arra is képes, hogy tudását megossza más cobotokkal. A jövőben lehet, hogy gépi látással elég lesz csupán megfigyelniük az operátort munka közben, ezt követően pedig már ők is el tudják végezni az adott folyamatot.

Forrás: FESTO
Ez a trend kezd az ipari robotok területén is egyre nagyobb teret hódítani, de a legtöbb esetben ezen berendezések működtetése még mély hozzáértést és sok munkaórát igényel. A legtöbb robotgyártónak ráadásul saját programnyelvük van, amit adott esetben a kezelőnek teljesen meg kell tanulnia. A BASIC vagy Pascal nyelvek elsajátítása ugyan meg tudja könnyíteni ezt a folyamatot, az egy gyártósoron előforduló berendezések számtalan különböző programnyelve sok esetben komoly problémákat tud okozni.

Forrás: ABB
4. Költségek
Végül, de nem utolsó sorban érdemes a költségeket illető különbségekről is említést tenni. A cobotok beszerzési költsége nagy általánosságban alacsonyabb, mint a hagyományos ipari robotoké. Ezt és egyszerű programozhatóságukat figyelembe véve gyorsabb megtérülést is ígérnek. Mindez természetesen nem azt jelenti, hogy egyértelműen jobb automatizációs megoldást jelentenek. Az ipari robotok ugyan többnyire drágábbak, sebesség és terhelés szempontjából teljesen más szintű automatizációt kínálnak, ily módon, ha nem is gyorsabb, de magasabb megtérülést jelenthetnek.
A teljes költségbe természetesen a fenntartással járó kiadások is beleszámítanak, ami tovább árnyalja a kérdést. A kollaboratív robotok esetében gyakran előforduló probléma, hogy egy rosszul informálódott vásárló nem számol azzal, hogy cobotja valóban alkalmas-e a biztonságos együttműködésre. Bár egyértelműnek tűnhet, vannak esetek – például, ha a cobot valami éles szerszámot használ – amikor ezekhez a berendezésekhez is szükséges a biztonsági kerítés, ami természetesen többletköltséget jelent.
Egy másik szempont az energiafogyasztás. A cobotok kevesebb energiát igényelnek, de vajon jól hangzik-e egy 800 W-os óránkénti fogyasztás, ha az alatt az egy óra alatt a berendezés egyetlen alkatrész előállítását végezte el? Ennek megfelelően, egy ipari robot 3.000 W-os fogyasztása lehet alacsony is, ha ugyanennyi idő alatt számottevően több alkatrész gyártásában segédkezett.
Ahogy az a fentiekből is jól látszik, az összehasonlításnak nincs egyértelmű nyertese. Mint sok egyéb automatizációs megoldás esetén, itt is az egyedi körülmények, lehetőségek, igények és alkalmazások a mérvadók. Éppen ezért, a legfontosabb, hogy első körben alaposan felmérjük, mire is van szükségünk. Ha pontosan tudjuk, hogy a gyártósor mely részén van szükségünk segítségre, hol vannak a szűk keresztmetszetek, jól informáltan, megalapozottan választhatunk robotot.
Itthon is beszerezhető cobotok:
- Doosan kollaboratív robotok (a GE-CO Házi Kiállításán fog bemutatkozni)
- FANUC kollaboratív robotok
- Hanwha kollaboratív robotok
- KUKA LBR iiwa
- Mitsubishi kollaboratív robotok
- Omron kollaboratív robotok
- Techman Robot kollaboratív robotok
- Universal Robots kollaboratív robotok
- Yaskawa Motoman kollaboratív robotok