A robotok használata a kisebb vállalkozásoknál is egyre elterjedtebbé válik, hiszen a technológia rohamos fejlődése elérhetőbbé teszi a különböző robotizált cellákat. Térhódításuk legfőbb okai a kedvező árak, a nagyobb teljesítmény és az egyszerű használat.
Cikksorozatunk előző része a robotok offline programozásban rejlő lehetőségeket vette górcső alá, a folytatásban pedig arról írunk, hogyan válik egyre intuitívabbá, egyre egyszerűbbé a robotok vezérlése, tanítása, továbbra is a hegesztőrobotok példájánál maradva.
A tanítási módszerek fejlődése
Bár az automatizációnak köszönhetően elképzelhető, hogy a tanító kezelőpultok napjai meg vannak számlálva, vannak vállalatok, akik továbbra is ezek leegyszerűsítésén dolgoznak. A KUKA például ezért fejlesztette ki az általuk 6D egérnek hívott, smartPAD kezelőpulttal működő vezérlőt. A robotok mozgatásához általában használt léptető gombok sok felhasználó számára nehezen használhatók az XYZ koordináta-rendszer miatt. Ebben segít a 6D egér, ami sokkal hatékonyabban utánozza a robotok mozgását – ha az egeret előre toljuk, előre mozdul, ha hátra húzzuk, hátra, ha pedig tekerjük, a robot is fordul. Az egér használatával ráadásul az egyes mozdulatok összekötése is sokkal egyszerűbb, tehát gyorsabb is.

A megfelelő alkalmazáshoz azonban léteznek még ennél is egyszerűbb megoldások. A Yaskawa Motoman fejlesztése, a Kinetiq például egy olyan tanítórendszer, aminek segítségével kézzel állíthatjuk be a szükséges mozgásokat. Egy érzékelő képes lemérni a gépkezelő által az egyes lépésekben kifejtett erőt, majd ennek megfelelően kalkulálja a megfelelő irányvektorokat, és memorizálja a mozgásokat. Az eljáráshoz használt vezérlő tervezésében is az egyszerűségre törekedtek, ezért kezelőfelülete egy okostelefonéra hasonlít – főként ikonok alapján történik a tájékozódás, nem hosszú kódsorokon keresztül.
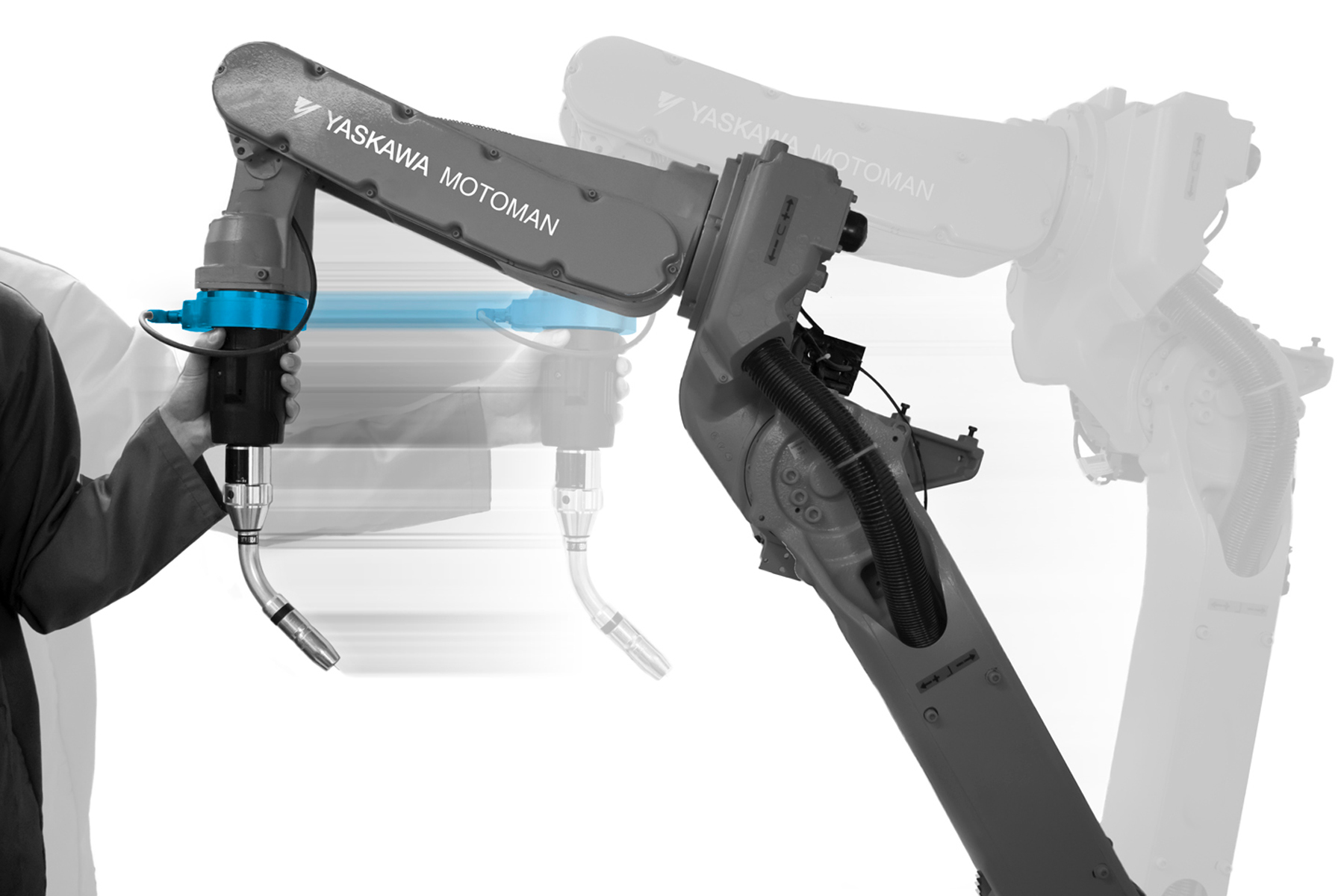
A rendszernek ráadásul nem feltétele, hogy gépkezelője hegesztő legyen, elég, ha a paramétereket jóváhagyta egy szakember. Ennek az egyszerű koncepciónak hála a gépkezelők akár fél nap alatt betaníthatók és tekintve, hogy a Kinetiq egy relatíve olcsó megoldás, még a kisebb üzemek számára is ésszerű döntés lehet.
Az ismétlődő, monoton feladatokra kiválóan alkalmas robot munkaerővel növelhető a termelékenység, a felszabaduló szakemberek tehetsége pedig így az alkalmazkodóképességet és változatosságot igénylő munkavégzésben kamatoztatható.
Mikor érdemes robotra váltani?
Számos egyértelmű előnyük ellenére a hegesztő robotok nem jelentenek minden esetben ideális megoldást egy kisebb vállalat esetében, ezért érdemes a beszerzés előtt számításba venni az alábbi tényezőket:
- A legnagyobb problémát az adott vállalat által gyártott termékcsaládok változatossága jelentheti. Ha egy kisebb méretű alkatrészt hegesztünk, ugyanebben a cellában egy lényegesen nagyobb darab megmunkálását már nem fogjuk tudni elvégezni. Érdemes ezért előzetesen meghatározni, hogy a gyártott alkatrészeket tekintve, melyek a legjellemzőbb méretek és ennek tudatában kiválasztani a cellát.
- Arról is fontos meggyőződni, hogy a befektetés biztosan meg fog-e térülni. Fókuszáljunk inkább a befektetésarányos megtérülésre (ROI = return of investment), ne a kezdeti kiadásra. Ha a beszerezni kívánt cella csak bizonyos műszakokban működne, valószínűleg nem lenne kifizetődő, ezzel szemben, ha maximálisan kihasználjuk a képességeit és a folyamatos működés beemelhető a gyártásba, akkor néhány éven belül megtérül az ára.
- Végül pedig érdemes számolni a fentebb taglalt tanítási módszerekkel: adott gyártási körülmények között szüneteltethető a gyártás arra az időre, amíg a gépkezelő betanítja a robotot a szükséges mozgásokra vagy elég képzettek az alkalmazottak az offline programozáshoz?
ForrásCanadian Metalworking