Akár zsákmányszerzés, akár a védelmet nyújtó gubó szövés céljából történik, a pókok és hernyók lenyűgöző formákat képesek létrehozni fonómirigyeik segítségével. A FESTO bionikus platformja, a 3D Cocooner hasonlóan összetett és stabil alakzatok készítésére képes.
Könnyű, stabil szerkezetek kialakítása három dimenzióban
A különböző szerkezetek kialakításához a 3D Cocooner egy üvegrostokból álló puha szálat használ. Hogy ezek a szálak szilárd rácsszerkezetté alakuljanak, a FESTO mérnökei egy speciális gyantával vonták be őket. Amint a szál elhagyja a mesterséges fonómirigyet, egy UV-lámpa fénye megkeményíti a gyantával áztatott rostokat és szilárd rudakká alakítja őket.

Fényre kötő műanyag: az UV-fény segítségével az üvegrostokból és gyantából szilrád rácsszerkezet készíthető
A folyamat során a szálat bármikor, a rácsszerkezet bármely pontján meg lehet szakítani, az újrakezdés után a szerkezet tovább építhető. Ennek köszönhetően akár komplex térbeli alakzatok is könnyedén kialakíthatók.
Kinematikus vezérlés delta robotkarral
A 3D Cocooner kezeléséért egy függőleges elrendezésű EXPT-45 párhuzamos rudazatú karmechanizmus felel. A nagysebességű kezelőrendszer gyorsan és pontosan irányítható, ami kifejezetten ideálissá teszi a feladathoz. A szükséges helyadatokat és vezérlőjeleket a robotkar egy animációs szoftveren keresztül kapja meg, amelyben a kialakítani kívánt struktúrák parametrikusan generálhatók egy 3D modell segítségével.

Precíz pályák: az állvány rendkívüli manőverezhetőségnek köszönhetően, a fonómirigy könnyedén mozgatható térben
Virtuális modelltől a kész tárgyig
A modell mellett a szoftver a teljes kezelőrendszert is vizuálisan tárolja, ami lehetővé teszi, hogy a pályatervezés folyamatát teljes mértékben a programon belül lehessen végezni, vizuális szimuláció mellett.
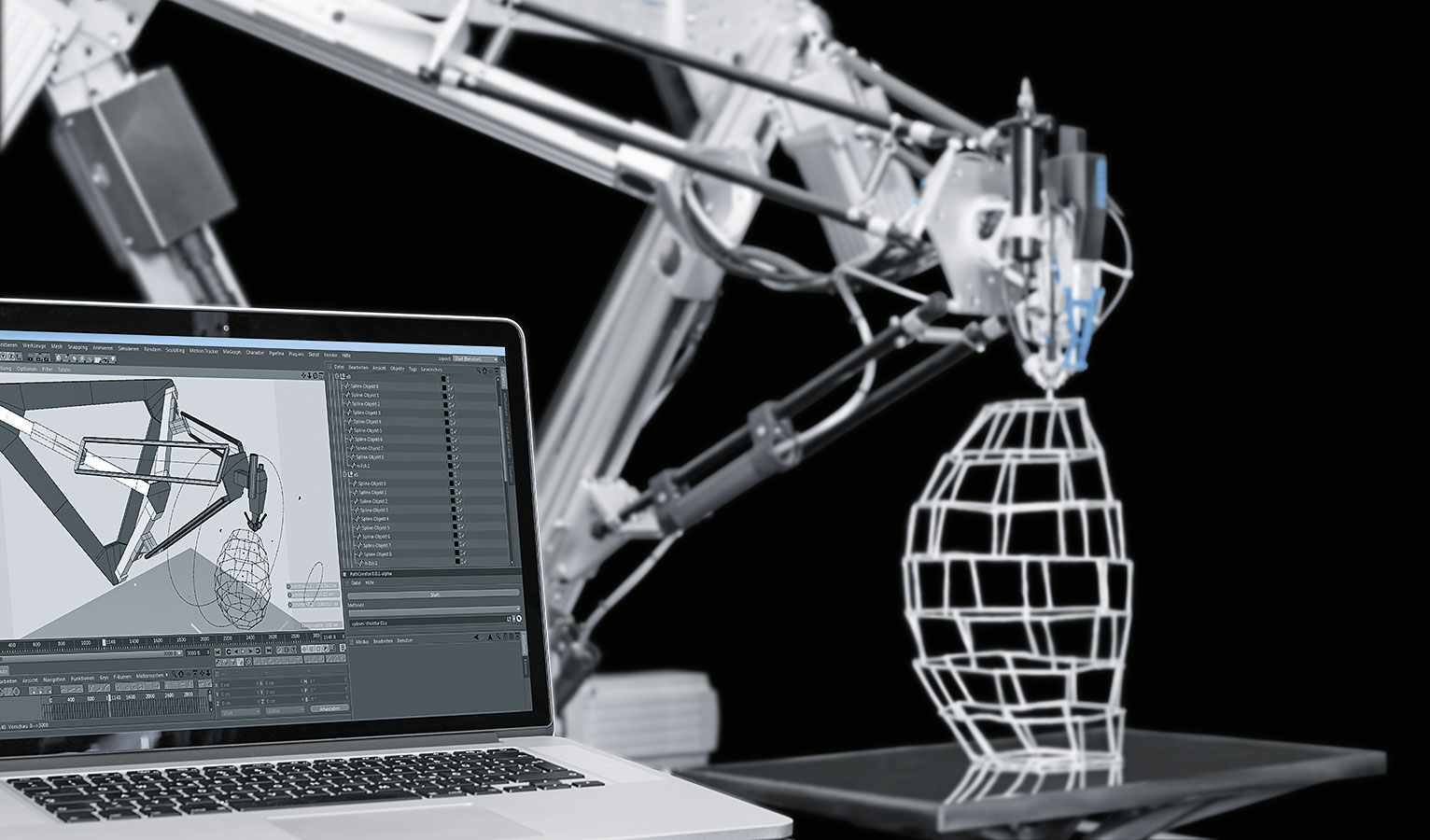
Virtuális megjelenítés: a modell és az irányítórendszer egyaránt megjeleníthetők az animációs szoftverben
Az így generált pályák pedig köztes lépések nélkül, közvetlenül elküldhetők a robotkarnak. Ez a megoldás ugyan meglehetősen szokatlan egy mai gyártói környezetben, a jövőben azonban fontos előfeltétele lehet a testre szabott gyártásnak.
ForrásFESTO