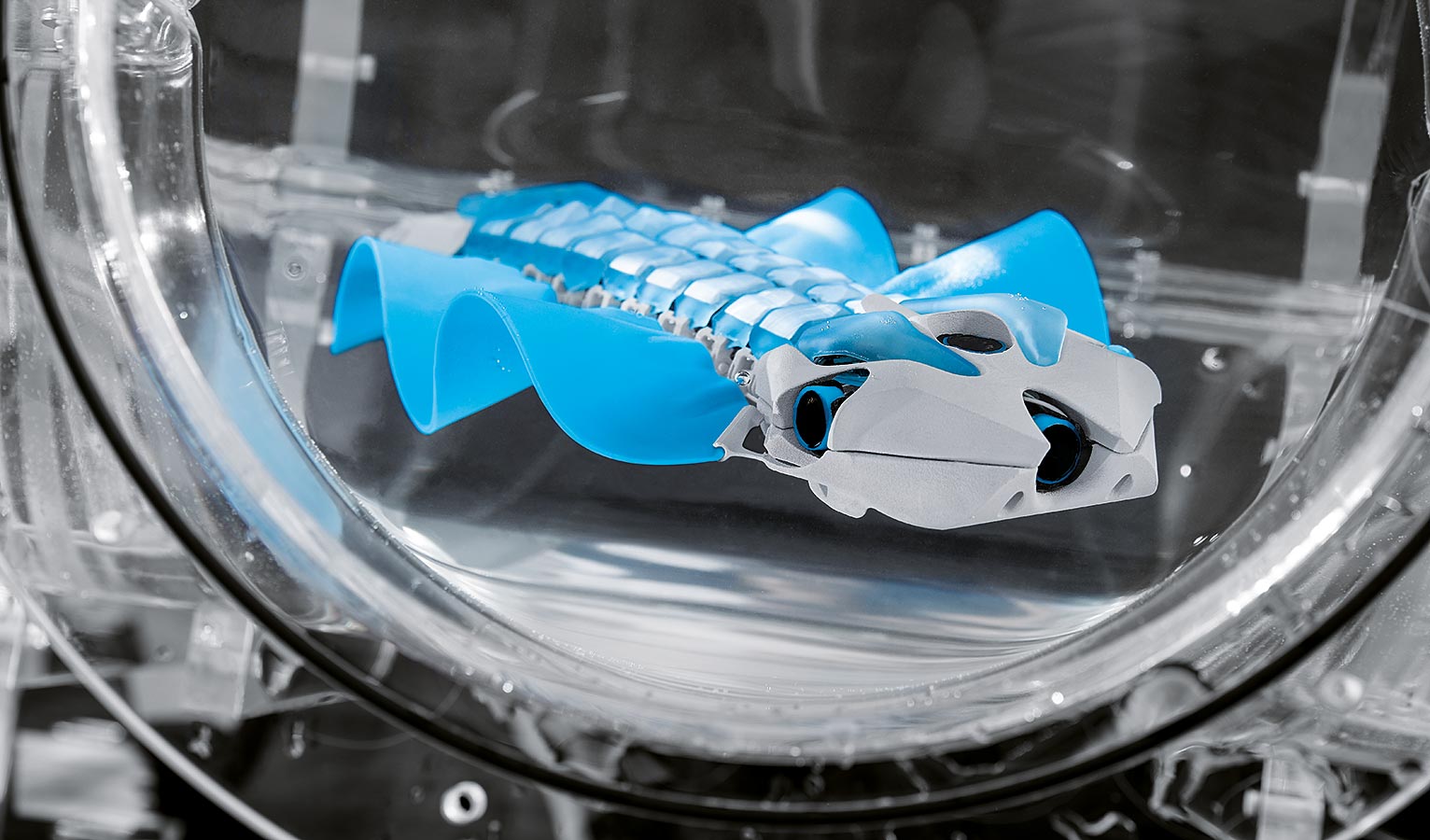
Mi a közös a tengeri planáriában, a tintahalban, vagy a sügérben? Ahhoz, hogy haladjanak a vízben, mindannyian az uszonyaikat használják, melyek hossza megegyezik a testükével. Ezt a köznyelvben hullámmozgásnak nevezett uszonymozgást használja a BionicFinWave is a haladáshoz, a bemutatóhoz készített átlátszó falú csőben. A mozgással egy időben az autonóm víz alatti robot képes kommunikálni és adatokat közölni a külvilággal vezetéknélküli kapcsolaton keresztül (így például adatokat rögzíthet a hőmérsékletről, vagy a közeg nyomásáról) – mindezt az operátorok tableten, vagy más eszközökön követhetik.
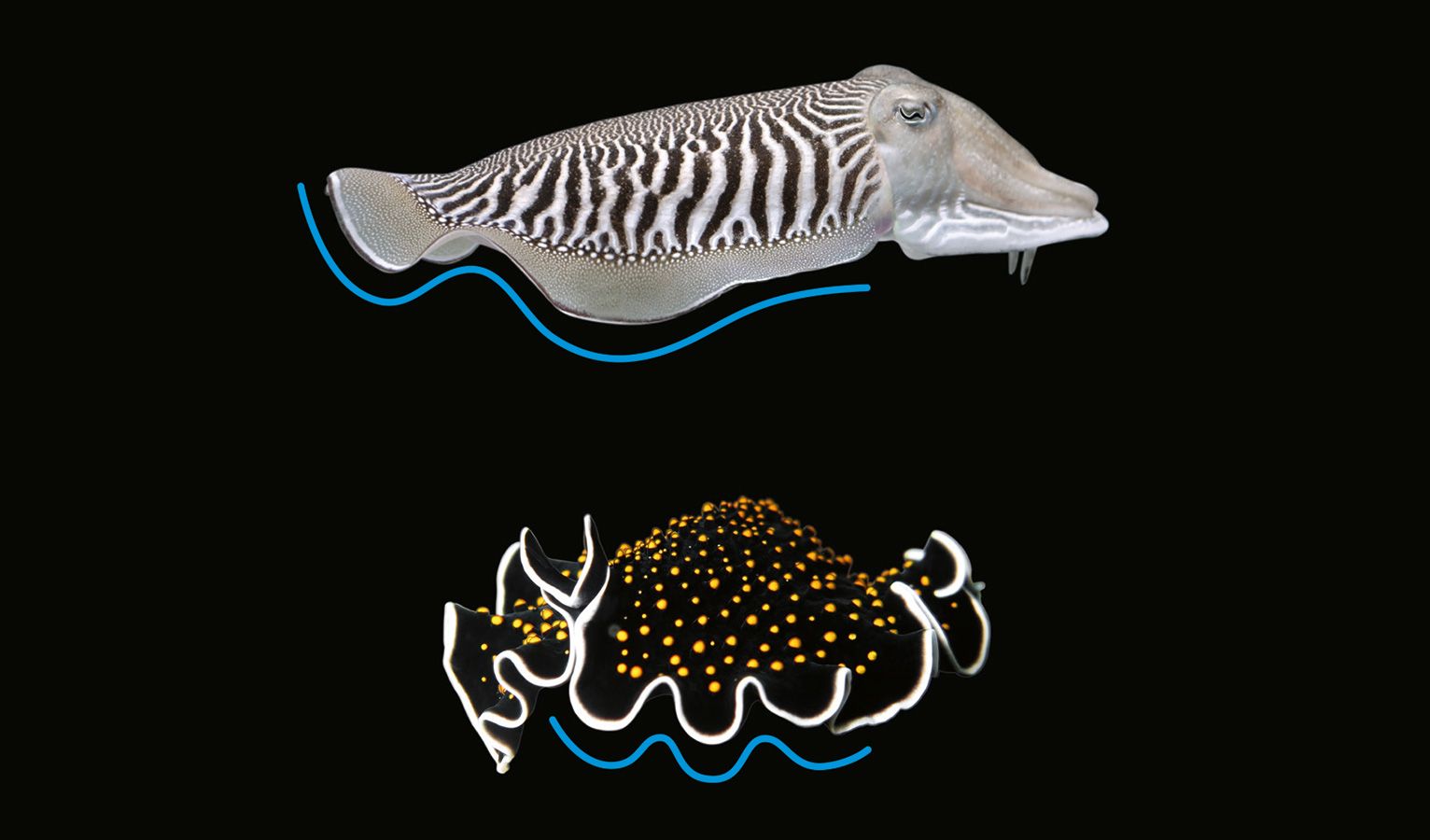
A természetben az uszonyok mozgása a fejtől indul, legyenek azok a test oldalán, a hasi felén, vagy a háton. A hullám alakú mozgás lehetővé teszi a halak és más vízi élőlények számára, hogy a vizet maguk mögé nyomják, ezzel képezve a mozgáshoz szükséges erőket. Természetesen hasonló mozgással képesek hátrafelé, illetve felfelé és lefelé is úszni.
Rugalmas szilikon uszonyok a természetes mozgásokhoz
A BionicFinWaves a két oldalán elhelyezett uszonyait használja a mozgások létrehozásához. Ezek szilikonból készültek, támasztóelemek nélkül, így kimagaslóan rugalmasak és tökéletesen képesek leutánozni a természetben is előforduló mozgásokat.
A két oldalon elhelyezett uszonyok kilenc-kilenc apróbb karra vannak kötve. Ezeket a karokat két szervomotor hajtja, amelyek a víz alatti robot testében kerültek elhelyezésre. Két csatlakoztatott főtengely továbbítja az erőt a karoknak, így az uszonyok egymástól teljesen függetlenül működnek. Tehát képesek eltérő mozgásmintákat követni, ezzel pedig elkerülhető a csavaros hajtások által keltett örvények létrehozása a vízben.
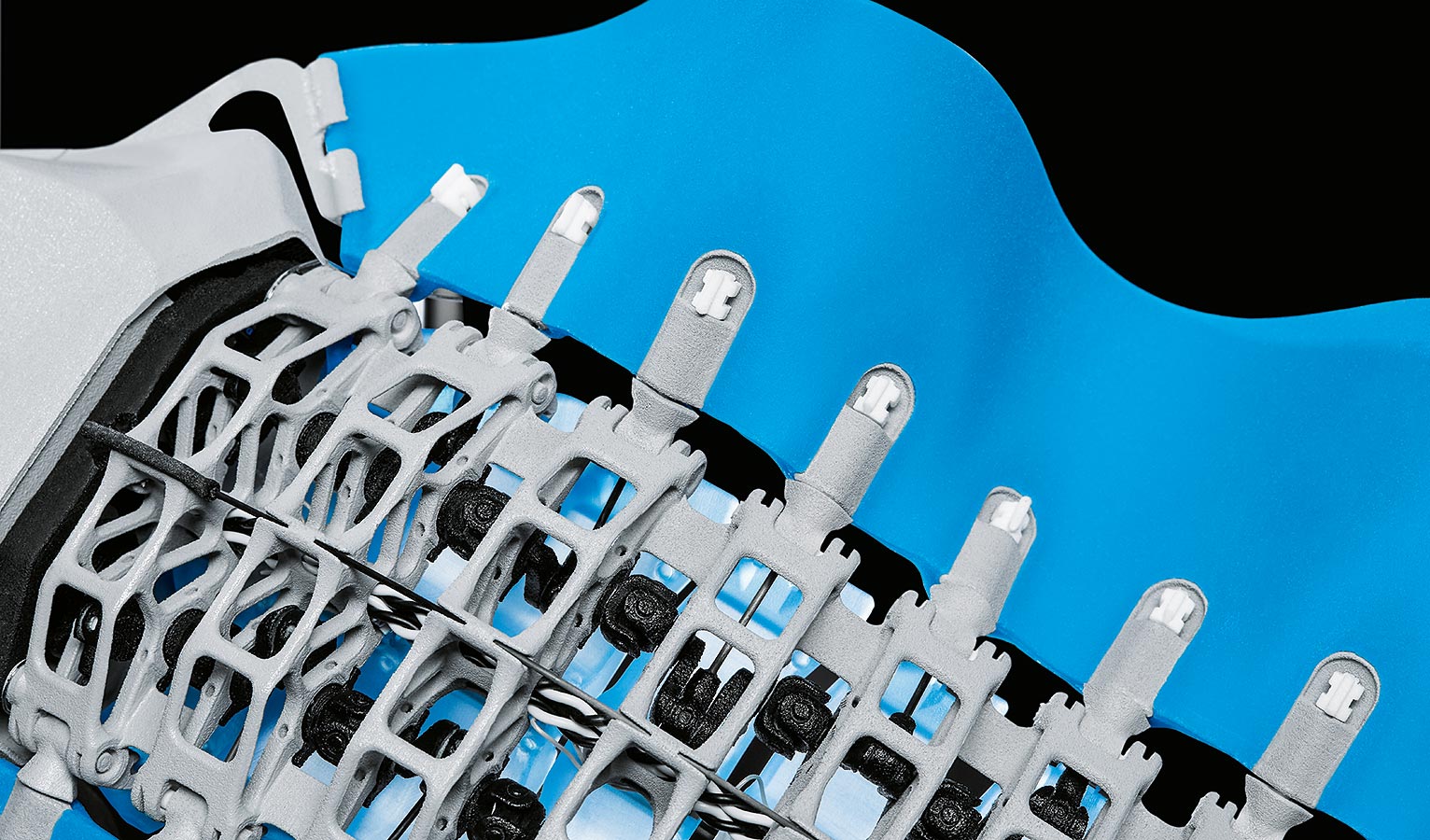
A kanyarodáskor az egyik oldali (külső) uszony gyorsabban mozog, mint a másik oldali (belső), hasonlóan a lánctalpas járműveknél használatos megoldáshoz. Egy harmadik szervomotor felel a fej mozgatásáért, amely a robot irányának meghatározásában jut szerephez, hiszen ezen múlik a test hajlítása. Ahhoz, hogy a test rugalmas maradjon, a főtengelyeket is több, apróbb darabból állították össze: minden szegmensnél kardáncsuklókat helyeztek el. A beépítésre kerülő tengelyeket bonyolultságuk és a megkövetelt rugalmasságuk figyelembe vételével 3D nyomtatással hozták létre.
Intelligens együttműködés számos más elemmel is
A BionicFinWaves további alkatrészeit is 3D nyomtatással készítették el. A kialakításnak köszönhetően az egész robot mintegy lebegő egységként képes működni. Belsejében a teljes vezérlés és szabályzási rendszer helyet kapott, míg a robot elejében további szenzorokat is elhelyeztek. Az érzékelők segítségével a robot folyamatosan követi a hőmérséklet és a nyomás változásait, valamint a test faltól való távolságát és mélységét haladás közben, utóbbiak segítségével kerülhetők el az esetleges ütközések is.
Új lendület és megközelítés a folyamatfelügyeletben
A FESTO Bionic Learning Network célja, hogy új lendületet adjon az iparági fejlesztéseknek a természet inspirálta megoldásokkal. A BionicFinWaves-hez hasonló fejlesztésekkel egyszerűbbé válhatnak az ipari mérések a feldolgozóiparban. Emellett a robot gyártásakor szerzett tervezési és fejlesztési tapasztalat támogathatja a hasonló, flexibilis alkatrészek gyártását is a későbbiekben.
ForrásFESTO