A SolidCAM 2017 újdonságait összefoglaló cikksorozatunk befejező részében a Szimultán 5-tengely és HSS (egyedi felületek marása) moduloknál elérhető újdonságokról lesz szó, kiegészítve a Gépszimuláció újdonságaival.
A SolidCAM újdonságait bemutató sorozat első része ezen, a második ezen, a harmadik pedig ezen a linken érhető el.
Szimultán 5-tengely & HSS
A SolidCAM 2017-ben már támogatott két új típusú szerszám. Ezek a Hordó alakú tórusz- (7.1 ábra) és gömbvégű marók (7.2 ábra). Ezeket a szerszámokat nagy meredekségű falak simítására lehet használni, csakhogy jóval nagyobb Z irányú fogásvétellel, mintha gömbmaróval marnánk. (Hiszen a szerszám palástja olyan mintha egy nagy (R50..R125..) gömb része volna). Ezért a nagy rádiusz miatt sokkal finomabb felületi érdességet kapunk. Másik előnye, hogy 5-tengelyes marás esetén kisebb dőlésszög elegendő a működéséhez.
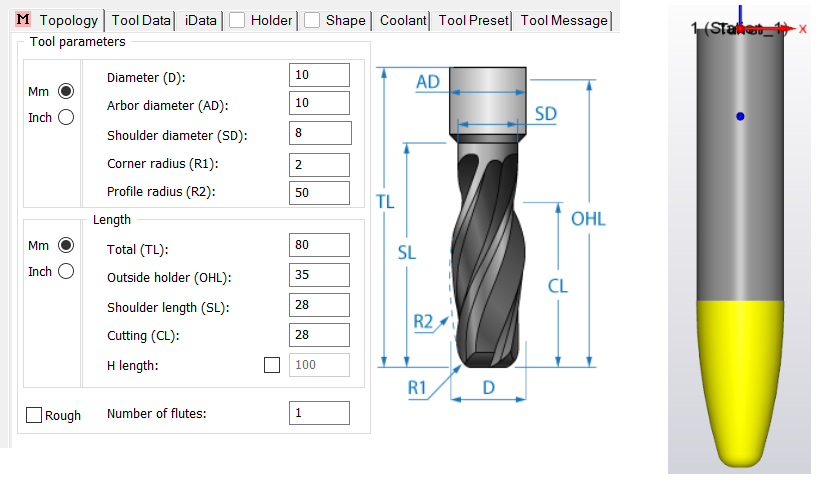
7.1 ábra

7.2 ábra
A következő új opció a „Pontos oldallépés” nevet is kaphatná. Amennyiben a marás irányát görbével vagy felülettel határozzuk meg, nem egyenlő oldallépésű pályát kaphatunk. Ennek hátterét – hogy, hogyan is vetíti a görbét a megmunkálandó felületre és osztja ki a lépéseket – most nem részletezném. A lényeg: a „Tool path parameter” (Simítási paraméterek) ágon elérhető új kapcsoló, aminek segítségével bekapcsolhatjuk a pontos oldallépés funkciót és a 7.3 ábrán látható egységes pályát lehet kapni.
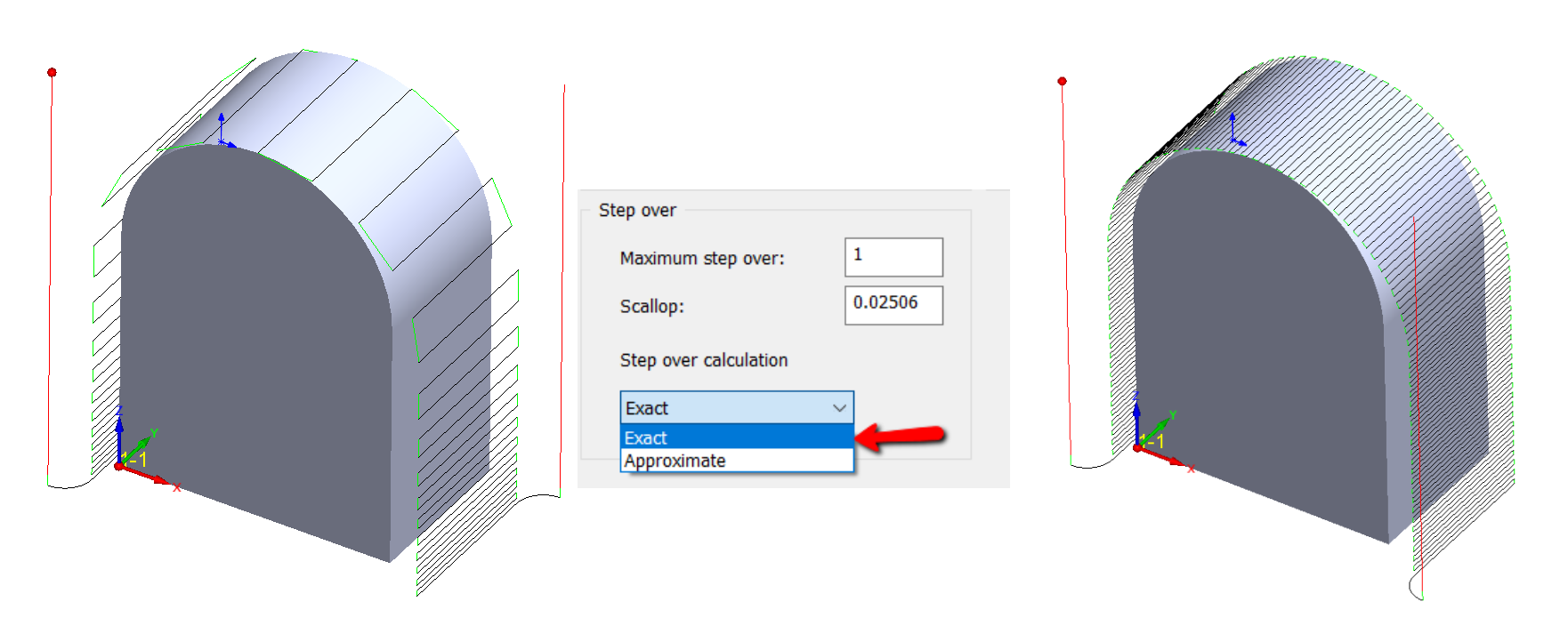
7.3 ábra
Szimultán 5-tengely
Szimultán 5-tengelyes műveletnél különböző stratégiák állnak rendelkezésre. Ilyen lehet: párhuzamos marás görbével ill. egy határos felülettel vagy két görbe ill. felület közötti átmenet. Egy közös van bennük, hogy alapesetben a kijelölt felületre mindig merőlegesen áll a szerszám tengely (8.1 ábra). (Ezt a merőlegességet lehet különböző beállításokkal módosítani, de a viszonyítási alap mindig a felületre merőleges vektor). Ebből az következik, hogy a szerszám „dőlése” lépésről lépésre változhat. Egy új kapcsoló bevezetésével viszont meg tudja keresni a közös (minden felületnél megfelelő) dőlésszöget és ez alapján számolja a pályát (8.2 ábra). Olyan ez, mintha egy indexált (rögzített) elforgatást alkalmazna a SolidCAM automatikusan, anélkül(!), hogy az elforgatás koordinátarendszerét a felhasználónak kellene definiálni.

8.1 ábra
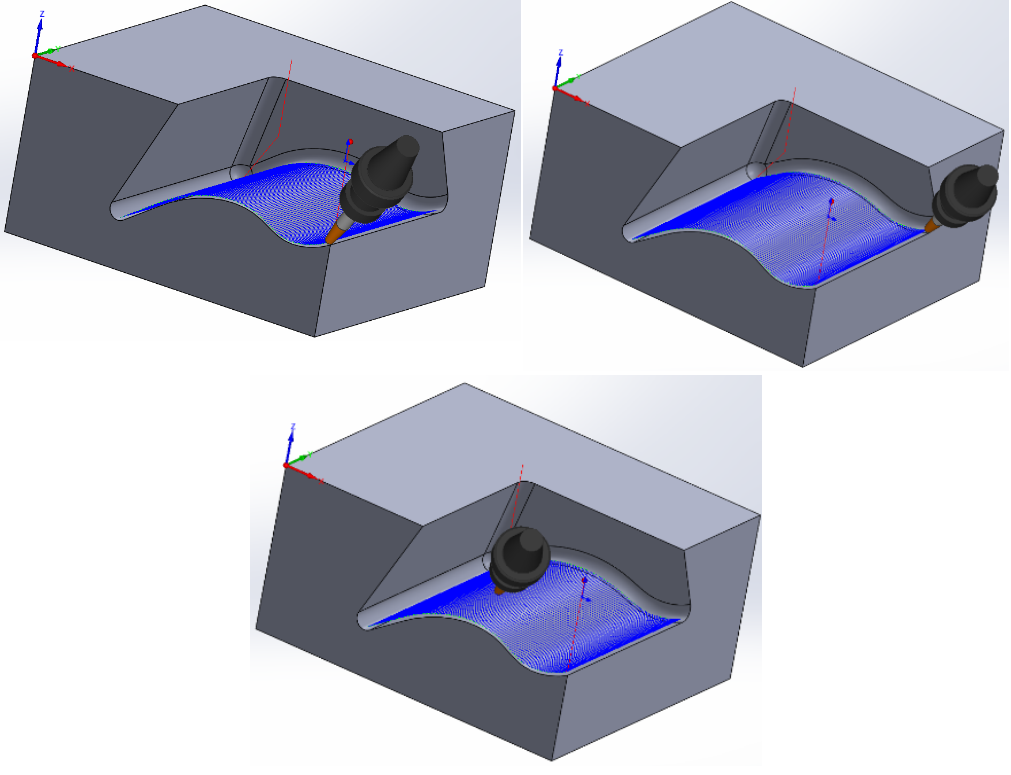
8.2 ábra
A szimultán 5-tengelyes megmunkálások hosszadalmasnak tűnő beállításának elkerüléséhez, a SolidCAM fejlesztői már korábban készítettek olyan speciális stratégiákat, amelyek nagymértékben leegyszerűsítik (bizonyos tipikus feladatokhoz) a programozást. Ezeket is folyamatosan fejlesztik. Ilyen stratégiák (a teljesség igénye nélkül): a SWARF (Palásttal marás), vagy a többtengelyű fúrás, illetve az alább említettek:
A speciális stratégiák közül a MultiBlade (jobb fordítás híján Turbina marás, propeller marás) művelet továbbfejlesztése során az automatikus megmunkálás során támogatja a Szár-, illetve tóruszmarókat a nagyoláshoz és a gömbfejű (lollipop) marókat simításhoz. (8.3 ábra)

8.3 ábra
A „Port Machining” a hajlított csőszerű geometriák belső palástját tudja elkészíteni szimultán 5-tengelyes mozgásokkal, illetve az idei fejlesztésekkel, most már szimultán 4-tengelyessel is. (8.4 ábra)

8.4 ábra
A „MultiAxis Roughing” (több-tengelyes nagyolás) műveletnél, a műveleten belül is van lehetőség az előgyártmány meghatározására a felületek kijelölésével (8.5 ábra). Ez az új funkció öntvény vagy előmunkált előgyártmány felülbírálására használható.

8.5 ábra
A SolidCAM fejlesztői új műveletet adtak a többi mellé. Ennek a Screw Machining („Csavar Megmunkálás”) nevet adták. A támogatott szerszám-típusok: Szár-, Tórusz-, Gömbmaró. A megmunkálás úgy dolgozik, mintha 3-tengelyes nagyolás lenne, de itt egy hengerpalást mentén történik a mozgás. A CAM-programozó csak kiválasztja a modellt, megadja a forgástengelyt, oldallépést és fogásmélységet és utána teljesen automatikusan elkészül a 4-tengelyes szerszámpálya a pálya elemek összekötésével, ütközésmentesen. Külön lehet kiválasztani a nagyolás (8.6 ábra) és simítás (8.7 ábra) opciót a művelet ablakán belül. Használat során úgy tűnhet, hogy a pályaszámítás hosszabb időt vesz igénybe, de a kapott speciális pálya kárpótol mindezért.
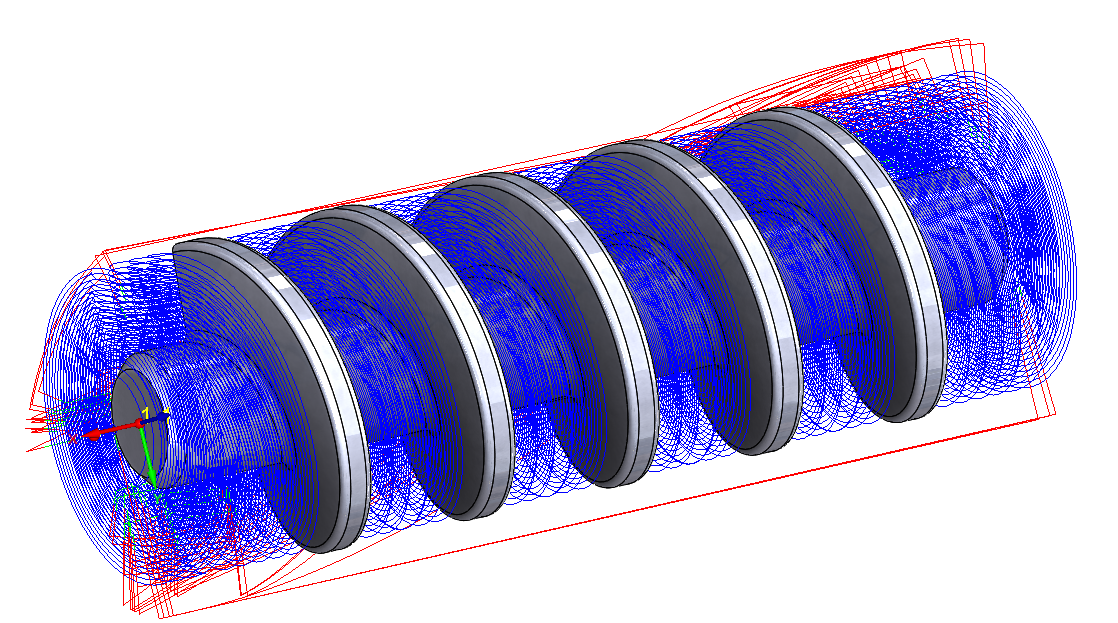
8.6 ábra
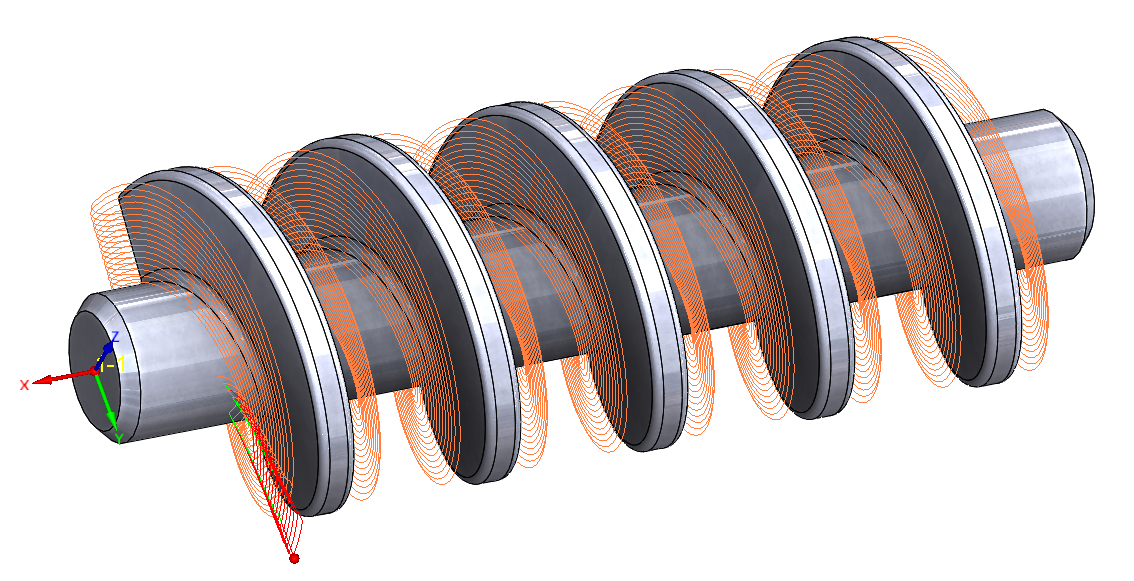
8.7 ábra
Gépszimuláció
Gépi szimulációban az egér bal gombjának nyomva tartása mellett lehet a nézetet forgatni. Forgatás közben egy pont jelenik meg, ami mutatja a kattintással kiválasztott forgatási középpontot.
9.1 ábra
Távolság mérés opció is fejlesztésen esett át, lehetővé téve a gép(!) és munkadarab tetszőleges pontjai közötti mérést. Pontok meghatározásánál kiírja a Munkadarab Koordináta Rendszer (WCS) szerint a koordinátát és a cél modelltől való eltérést (9.2 ábra). Távolság mérésénél pedig a pontok Gépi Koordináta Rendszer (MCS) szerinti helyét, 3D- és tengelyek szerinti távolságát valamint a bezárt szöget. (9.3 ábra)

9.2 ábra

9.3 ábra
A szimuláció során a leeső darabok automatikusan eltávolíthatóak, egy térfogat nagyságot megadva feltételnek. Ez az új opció, az előbb már említett Measure (mérés) fülön a „Remove chips (auto, based on volume)” opciónál állítható be (9.4 ábra).

9.4 ábra
„Távolság alapú” (length-based) szimuláció esetén új lehetőségként, egy adott távolságot (értsd: szerszámpálya által megtett utat) át lehet ugorni, és a szerszámot a pálya adott pozíciójába helyezni (9.5 ábra). Használatához a Folyamat (Progress) skálán kell jobb egérgombbal kattintani, és a felugró ablakba beírni azt a pozíciót (távolságot) ahova ugrani szeretnénk. Bár az előgyártmány állapota frissül, az átugrott pályához NINCS ütközésvizsgálat!

9.5 ábra
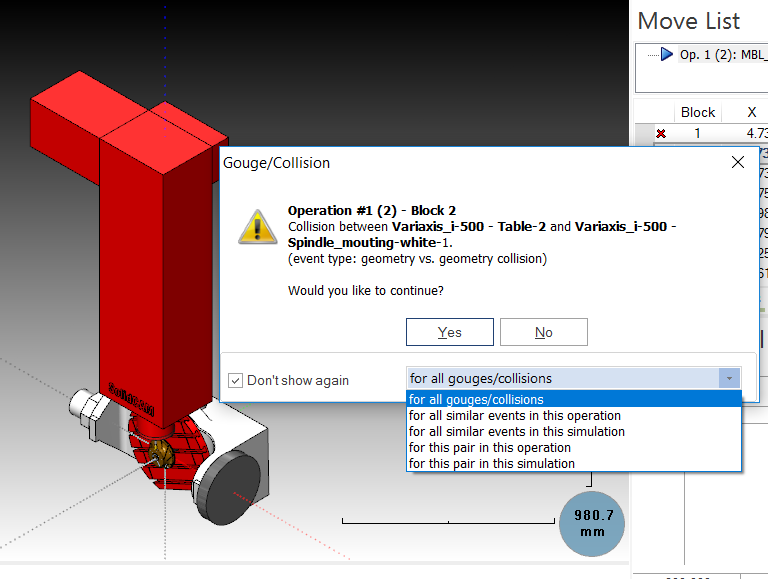
A szimuláció során felugró, figyelmeztető ablakok megjelenésének beállítása is továbbfejlesztése került. Ez azt jelenti, hogy a figyelmeztetéskor a 9.6 ábrán látható legördülő menüben ki lehet választani, hogy milyen esetben ne jelenjen meg többet. Vagyis bizonyos hibák megléte ellenére is, a szimuláció folyamatos lesz, végig lehet nézni ismételt kattintgatások nélkül is.
9.6 ábra
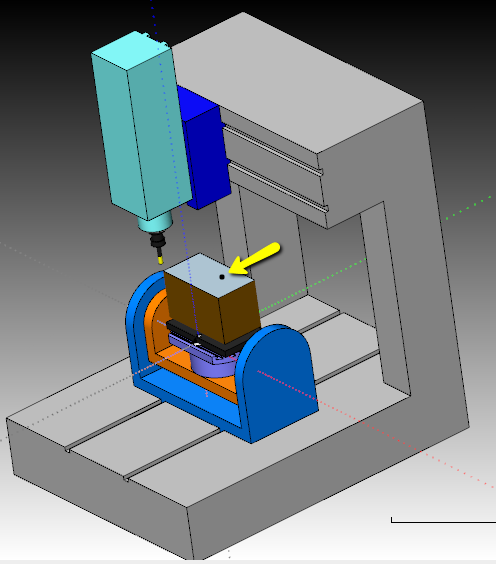
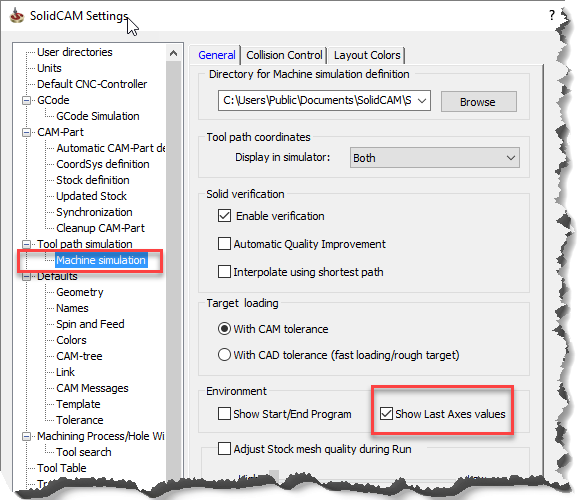
Amikor nem a teljes projectet futtatjuk a szimulációban, hanem csak egy műveletet, akkor jó tudni, hogy a szerszám éppen hol áll a művelet elején. Más szóval, az előző művelet utolsó szerszám pozícióját szeretnénk látni. Újdonságként ez a funkció is beállítható a SolidCAM beállításokban (Machine Simulation (gép szimulácó), Show Last Axes Values) (9.7 ábra). Így a részleges szimuláció is pontosabbá válhat (9.8 ábra).
9.7 ábra
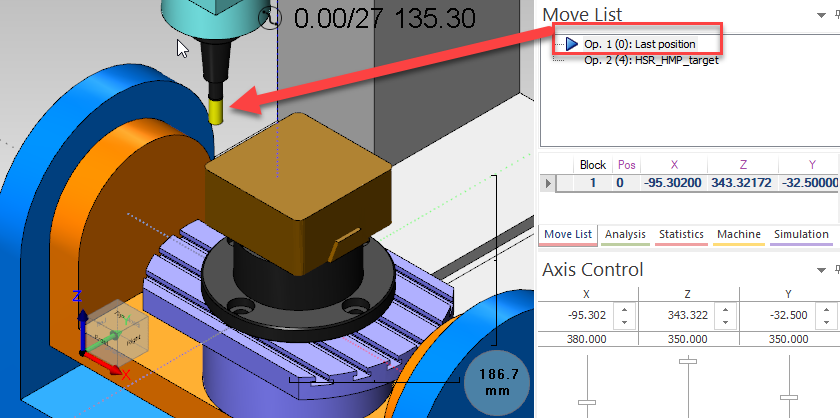
9.8 ábra
A szimuláció Move List (Mozgás lista) fülén megjelennek a szerszámpálya koordinátái Gépi- (MCS) és/vagy Munkadarab Koordináta rendszerben (WCS) (9.9 ábra). Ennek beállítása szintén a SolidCAM Setting-ben lehetséges, a Machine Simulation ágon (9.10 ábra).
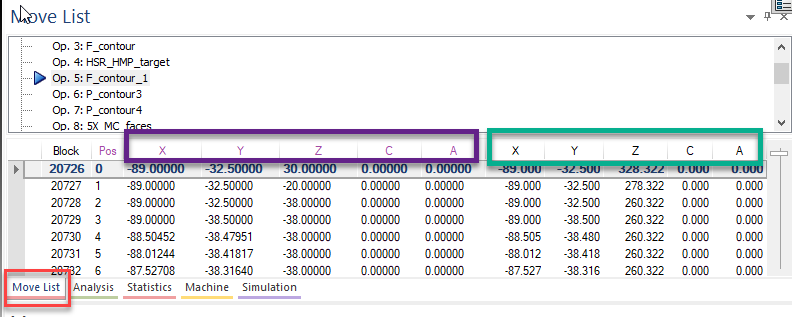
9.9 ábra
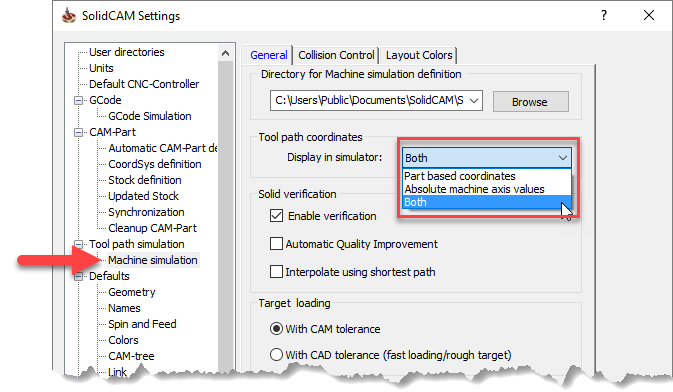
9.10 ábra
“Tisztelt Olvasó!
Ezzel a végére értünk a SolidCAM 2017 –es verzió újdonságainak bemutatásának. Remélem hasznosnak találta, és minél több mindent fog tudni hasznosítani belőle.
Köszönöm megtisztelő figyelmét!”
A SolidCAM újdonságait bemutató sorozat első része ezen, a második ezen, a harmadik pedig ezen a linken érhető el.
SzerzőHarmati Zsolt
További információ:
A SOLIDWORKS hivatalos magyarországi viszonteladója, az EuroSolid Kft. honlapján.
Forrás: SolidCAM.com , SolidCAM_2017_SP1_Whats_new.ppt