Legyen szó rövidebb átfutási időkről, gyorsabb termékciklusokról vagy éppen nagyobb rugalmasságról a termékmennyiségeket és -választékot illetően, a jövő elvárásai a gyártással szemben meglehetősen sokrétűek, ráadásul egyre gyorsabban változnak. Az ipar ilyen irányú átalakulásához elengedhetetlen az emberek, gépek és robotok interakcióinak újszerű, innovatív megközelítése.

A digitalizálódó gyártósorok, illetve a robotok által nyújtott automatizálási lehetőségek mellett, fokozatosan növekvő szükség mutatkozik az ember és gép közötti közvetlen interakciós megoldások fejlesztésére. Míg a korábbi, robotokat alkalmazó technológiák (pl.: robotcellák) ember és gép munkáját egymástól elszeparálva kezelték, addig a legújabb innovációk célja a területen, hogy ezeket a határokat eltüntessék, és inkább kooperatív és kollaboratív megoldásokat tegyenek elérhetővé.
A FESTO Bionic Learning Network (Bionikus Tudományok Hálózata) többek között ilyen technológiák fejlesztésén dolgozik. Egy korábbi cikkünkben már írtunk az OctopusGripper fantázianévre hallgató munkadarab megfogóról, jelen cikkünkben pedig egy kollaboratív robotkoncepcióról, a BionicCobot-ról fogunk beszámolni.
A robotkar működési elve
A FESTO BionicCobot-ot az emberi karról mintázták, a hasonlóság pedig nem csak az anatómiai felépítésében mutatkozik meg, hanem a hajlékonyságban, illetve az érzékeny, precíz mozdulatok végrehajtásában is. Felkarunk izomzatának elve a mozgást végző (agonista) és az azt fékező (antagonista) izmok együttes működésén alapszik, aminek segítségével finomabb, koordináltabb műveleteket is könnyedén végre tudjunk hajtani.
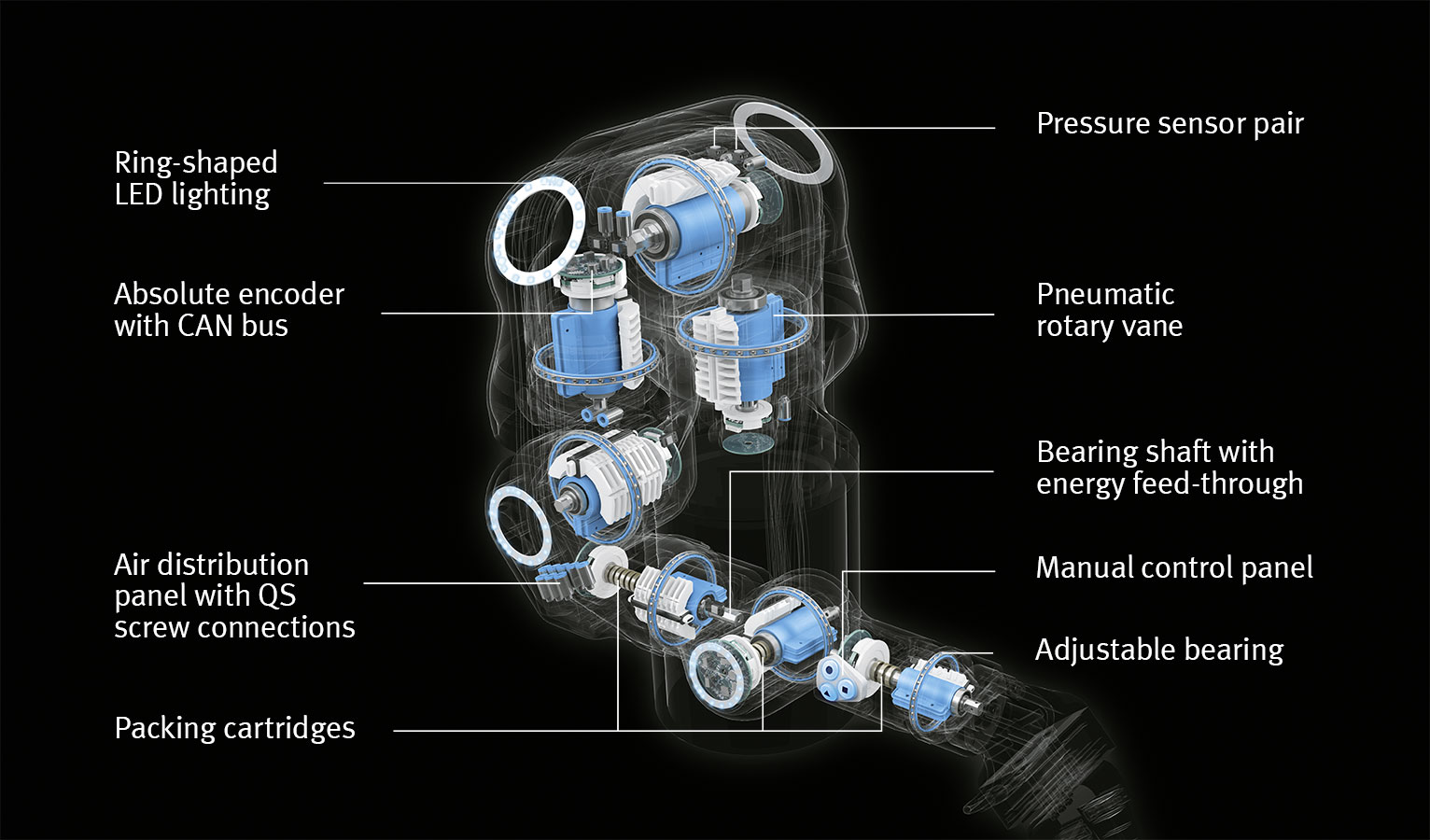
A BionicCobot pneumatikus rendszere ugyanezt az elvet alkalmazza, ráadásul annak mind a 7 ízületén. A vállrészében három, csuklórészében kettő, könyök- és alkarrészében pedig egy-egy tengely van, ezek mindegyikében található egy forgólapát és két légkamra. Utóbbi két komponens egy olyan rendszert eredményez, amelyet sűrített levegővel töltve, számtalan módon módosíthatunk.
Biztonság és könnyű kezelhetőség
Ez a meghajtás lehetővé teszi, hogy a BionicCobot ereje, merevsége és pontossága finoman szabályozható legyen, mindig az adott feladatnak megfelelően. Egy esetleges ütközés esetén a pneumatikus kar képes automatikusan ellazítani “izmait”, így pedig nem okoz sérülést. Ennek a rugalmasságnak és viszonylag könnyű súlyának köszönhetően védőketrec nélkül, emberekkel való közvetlen együttműködésben is nagyszerűen alkalmazható.
A BionicCobot kezelése az innovatív technológiáktól már-már elvárható egyszerűséggel; egy tableten futó alkalmazás intuitív grafikus felületének segítségével végezhető. A gépkezelő könnyedén betaníthat bármilyen mozdulatot, majd ezek különböző sorrendbe helyezésével komplett szekvenciákat hajtathat végre a mechanikus segéddel.

Alkalmazási lehetőségek és fejlesztés a jövőben
A FESTO bionikus karja, biztonságos, intuitív kezelhetőségének és rugalmasságának köszönhetően, hatalmas potenciált rejt magában ipari alkalmazhatósága szempontjából. Előnyei elsősorban a monoton, kevés mentális energiát vagy veszélyes mozgásokat igénylő feladatok végrehajtásában élvezhetők, ezeken a területeken kisebb kockázatot, nagyobb terhelhetőséget, ezáltal pedig növelt termelékenységet jelenthet.
A BionicCobot a jövőben számos technológiával lesz bővíthető, még tovább növelve hatékonyságát. Így például hangvezérléssel, képfeldolgozó- és infravörös követőrendszerrel vagy éppen mesterséges intelligenciával is felszerelhetővé lesz. A VR (virtual reality = virtuális valóság) technológia által lehetővé tett telemanipulációnak köszönhetően, a BionicCobot koszos, veszélyes környezetekben is kiváló segítség lehet, elég hozzá egy VR szemüveg, kezelője pedig biztonságos távolságból irányíthatja a saját karjának mozgását követő robotot.
ForrásFESTO